DEMO_Jansen_linkage_animation_01
Below is a demonstration for:
- Creating/running an animation for the Jansen linkage.
Contents
Keywords
- Jansen linkage
- Linkage
- anim8
References
clear; close all; clc;
Plot settings
fontSize=25; lineWidth1=8; lineWidth2=2; markerSize=50;
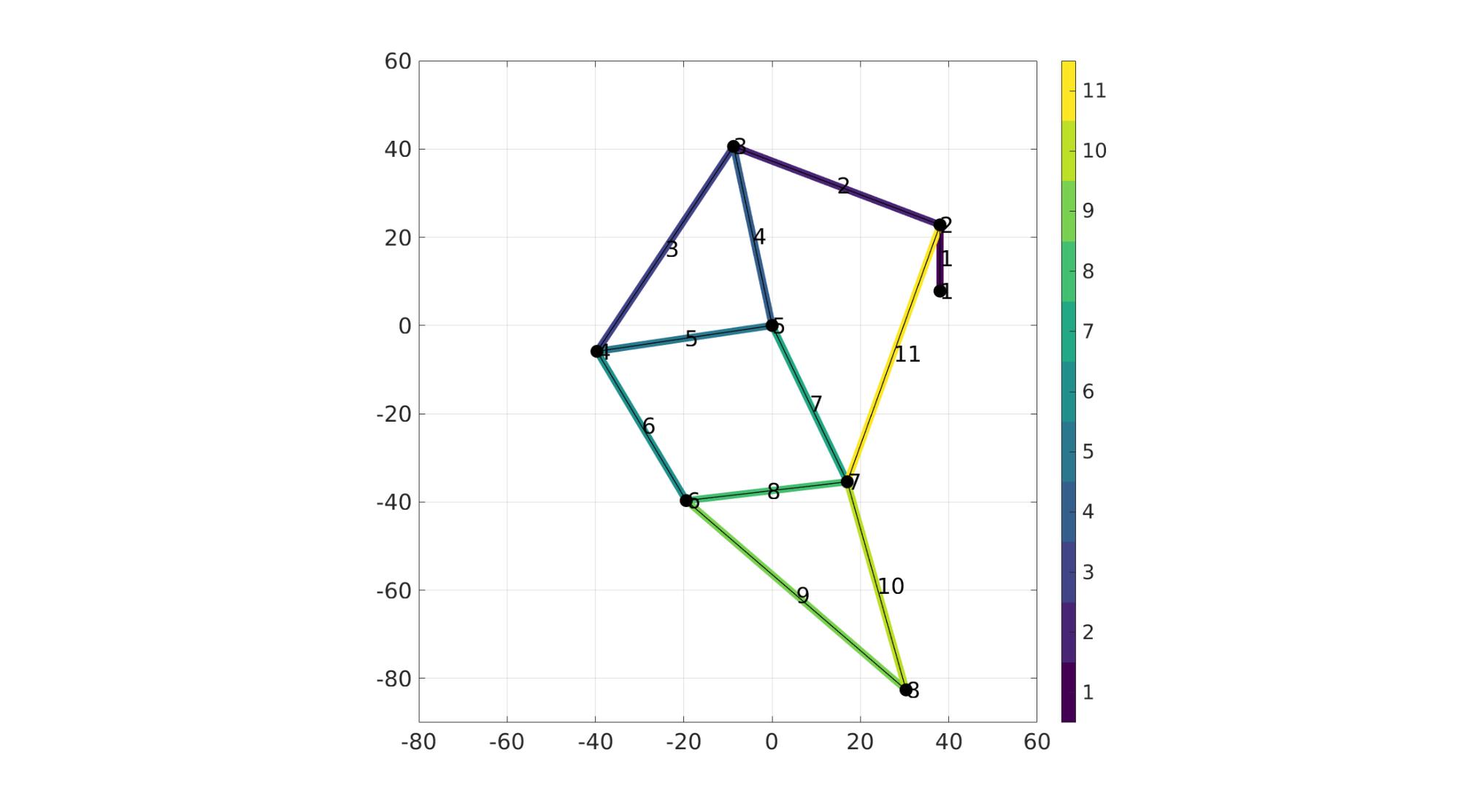
V=[38,7.80000000000000,0;... 38,22.8000000000000,0;... -8.73570000000000,40.5702000000000,0;... -39.6678000000000,-5.87170000000000,0;... 0,0,0;-19.4476000000000,-39.6874000000000,0;... 17.0047000000000,-35.4306000000000,0;... 30.3109000000000,-82.5894000000000,0]; E = [1 2; 2 3;3 4;3 5;4 5;4 6;5 7;6 7;6 8;7 8;2 7]; CE = (1:1:size(E,1))'; L=patchEdgeLengths(E,V); %Determine initial angle of crank a10=90+atand(abs((V(2,1)-V(1,1))/(V(2,2)-V(1,2))));
VE=patchCentre(E,V); hf=cFigure; hold on; he=gedge(E,V,CE,lineWidth1); pointAnnotate(V,[],'FontSize',fontSize); pointAnnotate(VE,[],'FontSize',fontSize); gedge(E,V,'k',1); %Initial plotV(V,'k.','MarkerSize',15); %Initial hp=plotV(V,'k.','MarkerSize',markerSize); axis equal; axis tight; grid on; box on; axis([-80 60 -90 60]); set(gca,'FontSize',fontSize); colormap viridis; icolorbar; %colorbar off; axis off; drawnow;
Vt=V;
nSteps=100; %Number of animation steps %Create angles to set view aRange=linspace(a10,a10+360,nSteps); %Create the time vector animStruct.Time=aRange; V8t=zeros(nSteps,3); for q=1:1:nSteps a1=aRange(q); %The current angle [Vt]=getxyval(a1,E,V); V8t(q,:)=Vt(8,:); Vt=real(Vt); [~,Vtt]=patchDetach(E,Vt); %Set entries in animation structure animStruct.Handles{q}=[he hp hp hp]; %Handles of objects to animate animStruct.Props{q}={'Vertices','XData','YData','ZData'}; %Properties of objects to animate animStruct.Set{q}={Vtt,Vt(:,1),Vt(:,2),Vt(:,3)}; %Property values for to set in order to animate end plotV(V8t,'r--','LineWidth',lineWidth2); anim8(hf,animStruct);
function [V]=getxyval(a1,E,V)
g5_34=vecAngle(V(3,:)-V(5,:),V(4,:)-V(5,:)); g7_68=vecAngle(V(6,:)-V(7,:),V(8,:)-V(7,:)); %Compute all lengths L=patchEdgeLengths(E,V); %Update coordinate for P2 V(2,1)=cosd(a1)*L(1)+V(1,1); V(2,2)=sind(a1)*L(1)+V(1,2); %Distance between P2 and P5 d25=sqrt(sum((V(2,:)-V(5,:)).^2,2)); a25=vecAngle(V(2,:)-V(5,:),[1 0 0]); g5_23=acosd((L(2)^2-d25^2-L(4)^2)./(-2*d25*L(4))); %Flip sign of angle when needed % a4=atand(R41(2)/R41(1)); if dot(V(2,:)-V(5,:),[0 1 0])<0 %&& (a1-a4)<360 a25=-a25; end a3=a25+g5_23; V(3,1)=cosd(a3)*L(4)+V(5,1); V(3,2)=sind(a3)*L(4)+V(5,2);
a4=a3+g5_34; V(4,1)=cosd(a4)*L(5)+V(5,1); V(4,2)=sind(a4)*L(5)+V(5,2);
g5_27=acosd((L(11)^2-d25^2-L(7)^2)./(-2*d25*L(7)));
a7=-(g5_27-a25);
V(7,1)=cosd(a7)*L(7)+V(5,1);
V(7,2)=sind(a7)*L(7)+V(5,2);
%Distance between P4 and P7
d47=sqrt(sum((V(4,:)-V(7,:)).^2,2));
g7_47_1=acosd((L(5)^2-d47^2-L(7)^2)./(-2*d47*L(7)));
g7_47_2=acosd((L(6)^2-d47^2-L(8)^2)./(-2*d47*L(8)));
g7_47=g7_47_1+g7_47_2;
a57=vecAngle(V(5,:)-V(7,:),[1 0 0]);
a6=g7_47+a57;
V(6,1)=cosd(a6)*L(8)+V(7,1);
V(6,2)=sind(a6)*L(8)+V(7,2);
a10=a6+g7_68; V(8,1)=cosd(a10)*L(10)+V(7,1); V(8,2)=sind(a10)*L(10)+V(7,2); % % %Create point coordinate array P % P=[x y]; % % %Use vector dot product to compute angle between links % R12=P(2,:)-P(1,:); % R41=P(1,:)-P(4,:); % t1=acosd(dot(R12,-R41)./(L1*L4)); % % %Use law of cosines to compute length of diagonal from P2-P4 % d=sqrt(L1^2+L4^2-2*L1*L4*cosd(t1)); % % %Use law of cosines to compute angles beta and gamma % b=acosd((L2^2-L3^2-d^2)/(-2*L3*d)); % g=acosd((L1^2-L4^2-d^2)/(-2*L4*d)); % % %Flip sign of angle when needed % a4=atand(R41(2)/R41(1)); % if (a1-a4)>180 && (a1-a4)<360 % g=-g; % end % a3=a4+180-(b+g); % % %Update coordinate of P3 % x(3)=cosd(a3)*L3+x(4); % y(3)=sind(a3)*L3+y(4);
end function [a]=vecAngle(r1,r2) a=acosd(dot(r1,r2)./(sqrt(sum(r1.^2))*sqrt(sum(r2.^2)))); end

GIBBON www.gibboncode.org
Kevin Mattheus Moerman, [email protected]
GIBBON footer text
License: https://github.com/gibbonCode/GIBBON/blob/master/LICENSE
GIBBON: The Geometry and Image-based Bioengineering add-On. A toolbox for image segmentation, image-based modeling, meshing, and finite element analysis.
Copyright (C) 2006-2022 Kevin Mattheus Moerman and the GIBBON contributors
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.