DEMO_febio_0033_sphere_tube_slide_body_force
Below is a demonstration for:
- Building geometry for a spherical blob with tetrahedral elements which is being aspirated into a tube. This demo consists off:
- Defining the boundary conditions
- Coding the febio structure
- Running the model
- Importing and visualizing the displacement results
Contents
Keywords
- febio_spec version 4.0
- febio, FEBio
- indentation
- contact, sliding, friction
- rigid body constraints
- hexahedral elements, hex8
- quadrilateral elements, quad4
- shell elements
- sphere
- static, solid
- hyperelastic, Ogden
- displacement logfile
- stress logfile
clear; close all; clc;
Plot settings
fontSize=15; faceAlpha1=0.8; faceAlpha2=0.3; markerSize=40; lineWidth=3;
Control parameters
% Path names defaultFolder = fileparts(fileparts(mfilename('fullpath'))); savePath=fullfile(defaultFolder,'data','temp'); % Defining file names febioFebFileNamePart='tempModel'; febioFebFileName=fullfile(savePath,[febioFebFileNamePart,'.feb']); %FEB file name febioLogFileName=[febioFebFileNamePart,'.txt']; %FEBio log file name febioLogFileName_disp=[febioFebFileNamePart,'_disp_out.txt']; %Log file name for exporting displacement % Sphere parameters sphereRadius=5; pointSpacing=0.4; % Ground plate parameters tubeRadius=0.8*sphereRadius; inletRadius=tubeRadius/3; tubeLength=sphereRadius*6; % Material parameter set materialType=1; c1=0.1e-3; %Shear-modulus-like parameter m1=2; %Material parameter setting degree of non-linearity k_factor=10; %Bulk modulus factor k=c1*k_factor; %Bulk modulus g1=2; %Viscoelastic QLV proportional coefficient t1=150; %Viscoelastic QLV time coefficient %Setting material density materialDensity=1e-9; %Density % FEA control settings timeTotal=1; %Total simulation time numTimeSteps=40; %Number of time steps desired max_refs=20; %Max reforms max_ups=0; %Set to zero to use full-Newton iterations opt_iter=6; %Optimum number of iterations max_retries=5; %Maximum number of retires dtmin=(timeTotal/numTimeSteps)/100; %Minimum time step size dtmax=timeTotal/(numTimeSteps); %Maximum time step size symmetric_stiffness=0; min_residual=1e-20; analysisType='DYNAMIC'; runMode='external';% 'internal' or 'external' %Contact parameters contactPenalty=50; fric_coeff=0.25; laugon=0; minaug=1; maxaug=10; %Specifying load sphereVolume=4/3*(pi*sphereRadius^3); %Sphere Volume in mm^3 sphereMass=sphereVolume.*materialDensity; %Sphere mass in tonne sphereSectionArea=pi*sphereRadius^2; bodyLoadMagnitude=(9.81*sphereMass*1000)*6500000; forceBodyLoad=sphereMass.*bodyLoadMagnitude; stressBodyLoad=forceBodyLoad/sphereSectionArea;
Creating model geometry and mesh
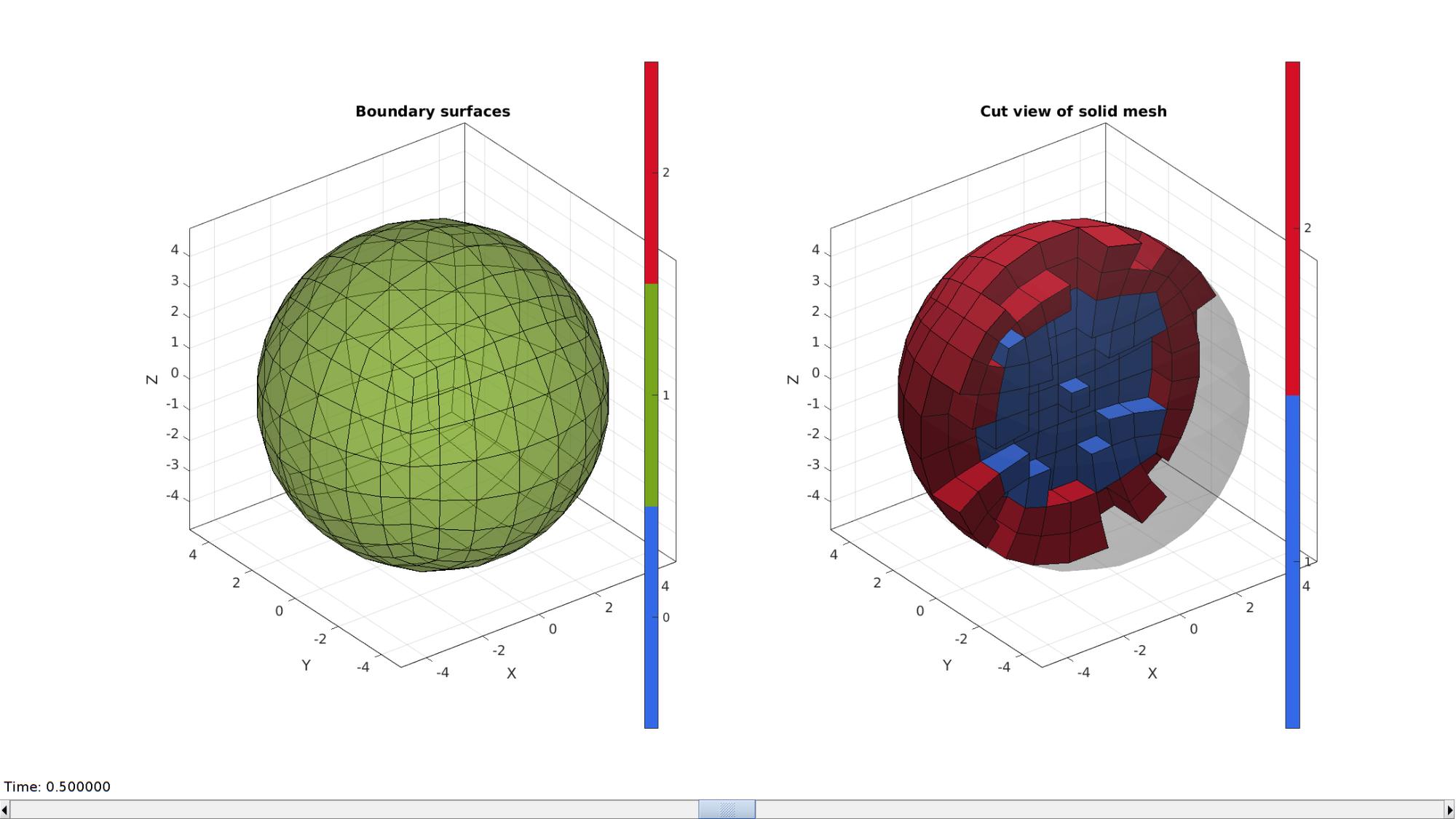
Creating a solid hexahedral mesh sphere
%Control settings optionStruct.sphereRadius=sphereRadius; optionStruct.coreRadius=sphereRadius.*0.75; optionStruct.numElementsCore=ceil((sphereRadius/2)/pointSpacing); optionStruct.numElementsMantel=ceil((sphereRadius-optionStruct.coreRadius)/(2*pointSpacing)); optionStruct.makeHollow=0; optionStruct.outputStructType=2; %Creating sphere [meshOutput]=hexMeshSphere(optionStruct); % Access model element and patch data Fb_blob=meshOutput.facesBoundary; Cb_blob=meshOutput.boundaryMarker; V_blob=meshOutput.nodes; E_blob=meshOutput.elements;
Visualize mesh
hFig=cFigure; subplot(1,2,1); hold on; title('Boundary surfaces','FontSize',fontSize); gpatch(Fb_blob,V_blob,Cb_blob,'k',0.5); % patchNormPlot(Fb,V); axisGeom(gca,fontSize); colormap(gjet); icolorbar; camlight headlight; hs=subplot(1,2,2); hold on; title('Cut view of solid mesh','FontSize',fontSize); optionStruct.hFig=[hFig hs]; gpatch(Fb_blob,V_blob,'kw','none',0.25); meshView(meshOutput,optionStruct); axisGeom(gca,fontSize); drawnow;
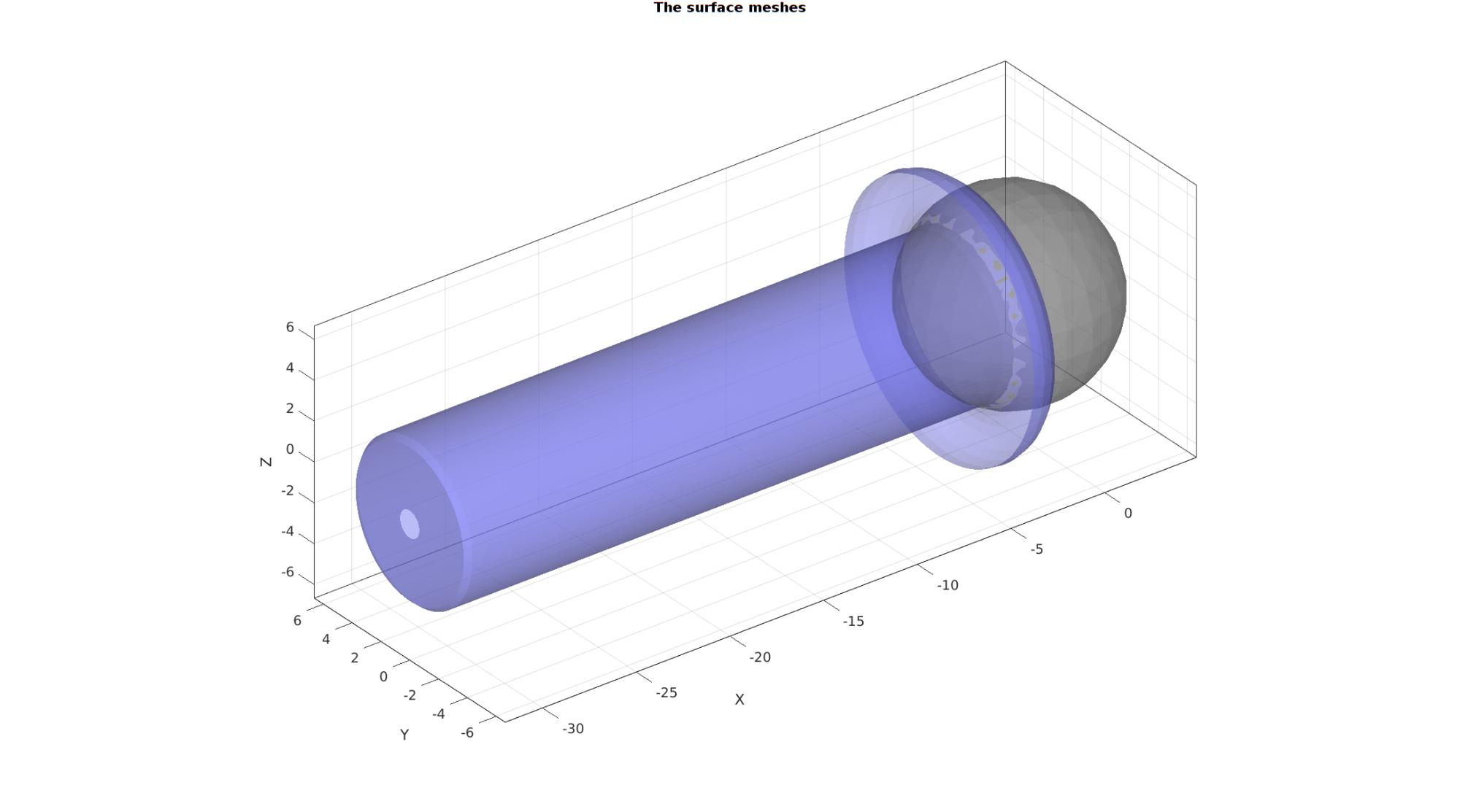
Creating tube model
pointSpacingTube=mean(patchEdgeLengths(Fb_blob,V_blob))/2; t=linspace(-0.1*pi,pi,100); x=inletRadius*sin(t); y=inletRadius*cos(t); V_curve_tube=[x(:) y(:) zeros(size(x(:)))]; V_curve_tube(:,1)=V_curve_tube(:,1)-inletRadius; V_curve_tube(:,2)=V_curve_tube(:,2)+inletRadius+tubeRadius; V_curve_tube(end+1,:)=[-tubeLength tubeRadius 0]; V_curve_tube(end+1,:)=[-tubeLength tubeRadius/6 0]; nResample=ceil(max(pathLength(V_curve_tube))./pointSpacingTube); V_curve_tube=evenlySampleCurve(V_curve_tube,nResample,'pchip',0); cPar.closeLoopOpt=1; cPar.numSteps=[]; %If empty the number of steps is derived from point spacing of input curve cPar.w=[1 0 0]; [F_tube,V_tube]=polyRevolve(V_curve_tube,cPar); V_tube(:,1)=V_tube(:,1)-sphereRadius; d=0.1; %Tube placement increment/tolerance while 1 R=sqrt(sum(V_tube.^2,2)); %Get current radii if min(R)<sphereRadius %If the tube is in the sphere space break else %If not in sphere space V_tube(:,1)=V_tube(:,1)+d; %Shift a bit end end center_of_mass_tube=mean(V_tube,1);
Visualization
cFigure; hold on; gtitle('The surface meshes',fontSize); gpatch(Fb_blob,V_blob,'kw','none',0.5); gpatch(F_tube,V_tube,'bw','none',0.5); % patchNormPlot(F_tube,V_tube); axisGeom(gca,fontSize); camlight headlight; drawnow;
Join model node sets
V=[V_blob; V_tube; ]; F_tube=F_tube+size(V_blob,1);
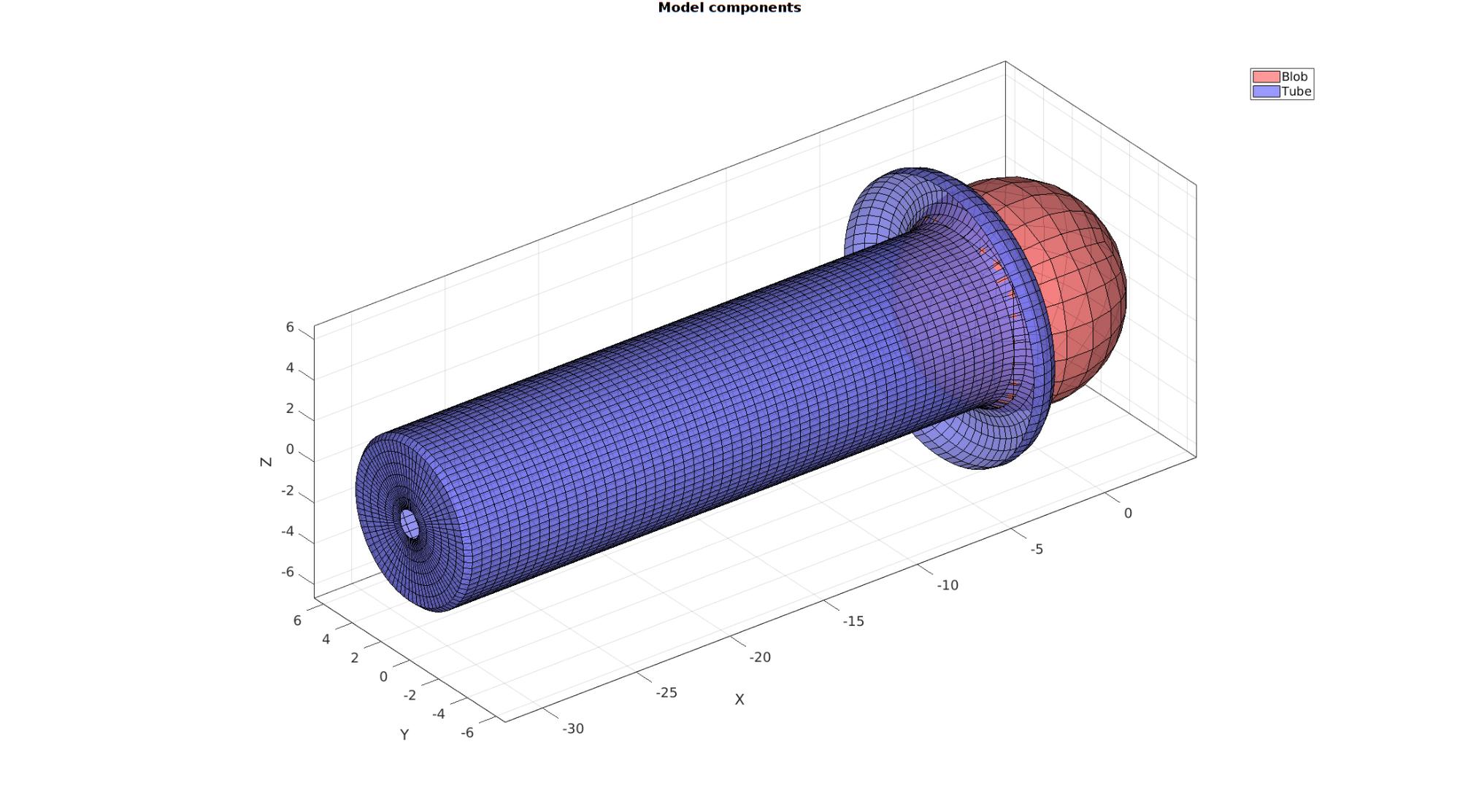
Visualizing model
cFigure; hold on; gtitle('Model components',fontSize); hl(1)=gpatch(Fb_blob,V,'rw','k',0.8); hl(2)=gpatch(F_tube,V,'bw','k',0.8); legend(hl,{'Blob','Tube'}); clear hl; axisGeom(gca,fontSize); camlight headlight; drawnow;
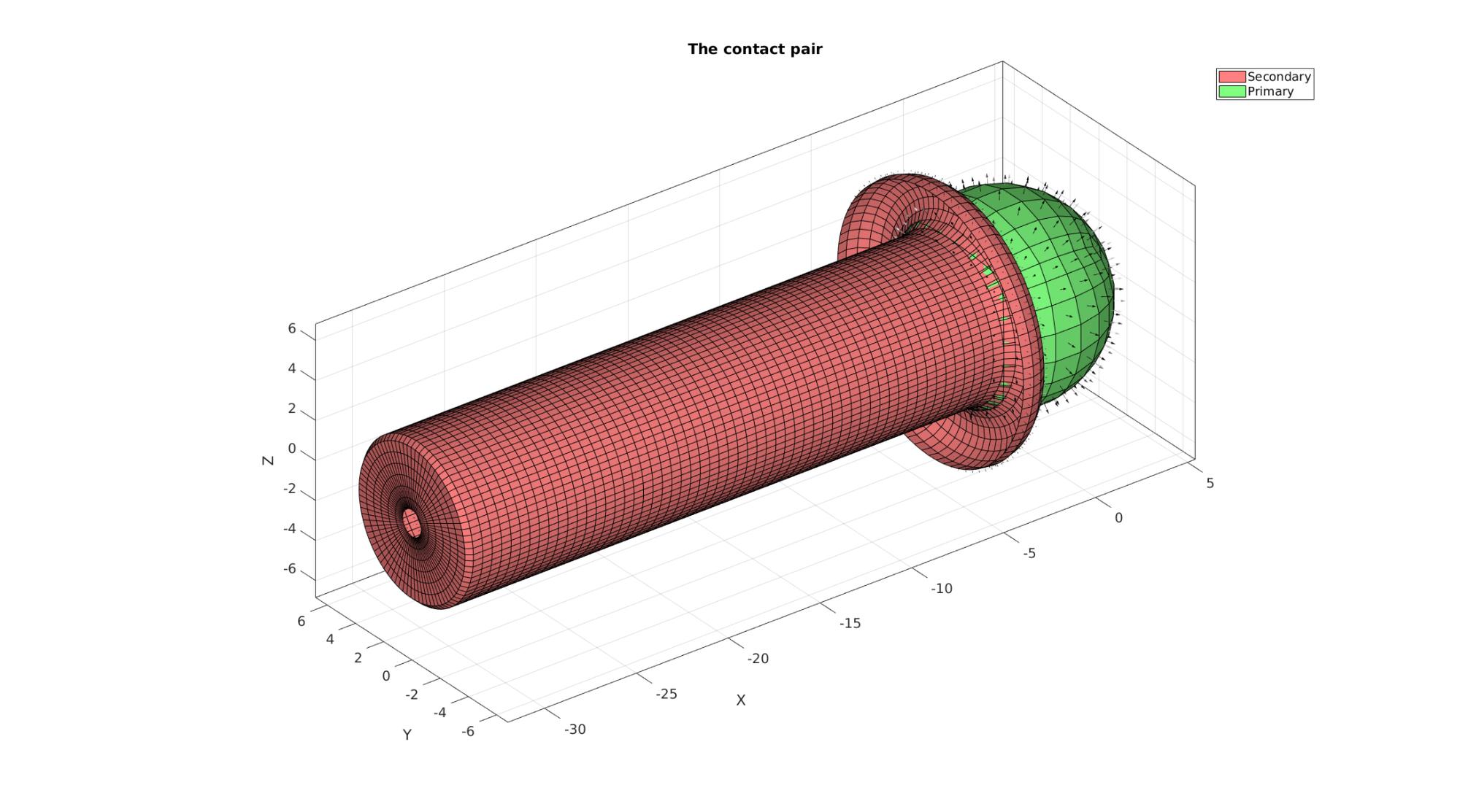
Get contact surfaces
F_contact_secondary=Fb_blob;
Visualize contact surfaces
cFigure; hold on; title('The contact pair','fontsize',fontSize); hl(1)=gpatch(F_tube,V,'rw','k',1); patchNormPlot(F_tube,V); hl(2)=gpatch(F_contact_secondary,V,'gw','k',1); patchNormPlot(F_contact_secondary,V); legend(hl,{'Secondary','Primary'}); clear hl; axisGeom(gca,fontSize); camlight headlight; drawnow;
Defining the FEBio input structure
See also febioStructTemplate and febioStruct2xml and the FEBio user manual.
%Get a template with default settings [febio_spec]=febioStructTemplate; %febio_spec version febio_spec.ATTR.version='4.0'; %Module section febio_spec.Module.ATTR.type='solid'; %Control section febio_spec.Control.analysis=analysisType; febio_spec.Control.time_steps=numTimeSteps; febio_spec.Control.step_size=timeTotal/numTimeSteps; febio_spec.Control.solver.max_refs=max_refs; febio_spec.Control.solver.qn_method.max_ups=max_ups; febio_spec.Control.solver.symmetric_stiffness=symmetric_stiffness; febio_spec.Control.time_stepper.dtmin=dtmin; febio_spec.Control.time_stepper.dtmax=dtmax; febio_spec.Control.time_stepper.max_retries=max_retries; febio_spec.Control.time_stepper.opt_iter=opt_iter; %Material section materialName1='Material1'; febio_spec.Material.material{1}.ATTR.name=materialName1; switch materialType case 0 febio_spec.Material.material{1}.ATTR.type='Ogden unconstrained'; febio_spec.Material.material{1}.ATTR.id=1; febio_spec.Material.material{1}.c1=c1; febio_spec.Material.material{1}.m1=m1; febio_spec.Material.material{1}.c2=c1; febio_spec.Material.material{1}.m2=-m1; febio_spec.Material.material{1}.cp=k; febio_spec.Material.material{1}.density=materialDensity; case 1 %Viscoelastic part febio_spec.Material.material{1}.ATTR.type='viscoelastic'; febio_spec.Material.material{1}.ATTR.id=1; febio_spec.Material.material{1}.g1=g1; febio_spec.Material.material{1}.t1=t1; febio_spec.Material.material{1}.density=materialDensity; %Elastic part febio_spec.Material.material{1}.elastic{1}.ATTR.type='Ogden unconstrained'; febio_spec.Material.material{1}.elastic{1}.c1=c1; febio_spec.Material.material{1}.elastic{1}.m1=m1; febio_spec.Material.material{1}.elastic{1}.c2=c1; febio_spec.Material.material{1}.elastic{1}.m2=-m1; febio_spec.Material.material{1}.elastic{1}.cp=k; febio_spec.Material.material{1}.elastic{1}.density=materialDensity; end materialName2='Material2'; febio_spec.Material.material{2}.ATTR.name=materialName2; febio_spec.Material.material{2}.ATTR.type='rigid body'; febio_spec.Material.material{2}.ATTR.id=2; febio_spec.Material.material{2}.density=1; febio_spec.Material.material{2}.center_of_mass=center_of_mass_tube; %Mesh section % -> Nodes febio_spec.Mesh.Nodes{1}.ATTR.name='nodeSet_all'; %The node set name febio_spec.Mesh.Nodes{1}.node.ATTR.id=(1:size(V,1))'; %The node id's febio_spec.Mesh.Nodes{1}.node.VAL=V; %The nodel coordinates % -> Elements partName1='Part1'; febio_spec.Mesh.Elements{1}.ATTR.name=partName1; %Name of this part febio_spec.Mesh.Elements{1}.ATTR.type='hex8'; %Element type febio_spec.Mesh.Elements{1}.elem.ATTR.id=(1:1:size(E_blob,1))'; %Element id's febio_spec.Mesh.Elements{1}.elem.VAL=E_blob; %The element matrix partName2='Part2'; febio_spec.Mesh.Elements{2}.ATTR.name=partName2; %Name of this part febio_spec.Mesh.Elements{2}.ATTR.type='quad4'; %Element type febio_spec.Mesh.Elements{2}.elem.ATTR.id=size(E_blob,1)+(1:1:size(F_tube,1))'; %Element id's febio_spec.Mesh.Elements{2}.elem.VAL=F_tube; %The element matrix % -> Surfaces surfaceName1='contactSurface1'; febio_spec.Mesh.Surface{1}.ATTR.name=surfaceName1; febio_spec.Mesh.Surface{1}.quad4.ATTR.id=(1:1:size(F_tube,1))'; febio_spec.Mesh.Surface{1}.quad4.VAL=F_tube; surfaceName2='contactSurface2'; febio_spec.Mesh.Surface{2}.ATTR.name=surfaceName2; febio_spec.Mesh.Surface{2}.quad4.ATTR.id=(1:1:size(F_contact_secondary,1))'; febio_spec.Mesh.Surface{2}.quad4.VAL=F_contact_secondary; % -> Surface pairs contactPairName='Contact1'; febio_spec.Mesh.SurfacePair{1}.ATTR.name=contactPairName; febio_spec.Mesh.SurfacePair{1}.primary=surfaceName2; febio_spec.Mesh.SurfacePair{1}.secondary=surfaceName1; %MeshDomains section febio_spec.MeshDomains.SolidDomain.ATTR.name=partName1; febio_spec.MeshDomains.SolidDomain.ATTR.mat=materialName1; febio_spec.MeshDomains.ShellDomain.ATTR.name=partName2; febio_spec.MeshDomains.ShellDomain.ATTR.mat=materialName2; %Loads section % -> Body load febio_spec.Loads.body_load.ATTR.type='const'; febio_spec.Loads.body_load.x.ATTR.lc=1; febio_spec.Loads.body_load.x.VAL=bodyLoadMagnitude; febio_spec.Loads.body_load.y.ATTR.lc=1; febio_spec.Loads.body_load.y.VAL=0; febio_spec.Loads.body_load.z.ATTR.lc=1; febio_spec.Loads.body_load.z.VAL=0; %Rigid section % ->Rigid body fix boundary conditions febio_spec.Rigid.rigid_bc{1}.ATTR.name='RigidFix_1'; febio_spec.Rigid.rigid_bc{1}.ATTR.type='rigid_fixed'; febio_spec.Rigid.rigid_bc{1}.rb=2; febio_spec.Rigid.rigid_bc{1}.Rx_dof=1; febio_spec.Rigid.rigid_bc{1}.Ry_dof=1; febio_spec.Rigid.rigid_bc{1}.Rz_dof=1; febio_spec.Rigid.rigid_bc{1}.Ru_dof=1; febio_spec.Rigid.rigid_bc{1}.Rv_dof=1; febio_spec.Rigid.rigid_bc{1}.Rw_dof=1; %Contact section febio_spec.Contact.contact{1}.ATTR.type='sliding-elastic'; febio_spec.Contact.contact{1}.ATTR.surface_pair=contactPairName; febio_spec.Contact.contact{1}.two_pass=0; febio_spec.Contact.contact{1}.laugon=laugon; febio_spec.Contact.contact{1}.tolerance=0.2; febio_spec.Contact.contact{1}.gaptol=0; febio_spec.Contact.contact{1}.minaug=minaug; febio_spec.Contact.contact{1}.maxaug=maxaug; febio_spec.Contact.contact{1}.search_tol=0.01; febio_spec.Contact.contact{1}.search_radius=0.1*sqrt(sum((max(V,[],1)-min(V,[],1)).^2,2)); febio_spec.Contact.contact{1}.symmetric_stiffness=0; febio_spec.Contact.contact{1}.auto_penalty=1; febio_spec.Contact.contact{1}.penalty=contactPenalty; febio_spec.Contact.contact{1}.fric_coeff=fric_coeff; %LoadData section % -> load_controller febio_spec.LoadData.load_controller{1}.ATTR.name='LC1'; febio_spec.LoadData.load_controller{1}.ATTR.id=1; febio_spec.LoadData.load_controller{1}.ATTR.type='loadcurve'; febio_spec.LoadData.load_controller{1}.interpolate='LINEAR'; %febio_spec.LoadData.load_controller{1}.extend='CONSTANT'; febio_spec.LoadData.load_controller{1}.points.pt.VAL=[0 0; 1 1]; %Output section % -> log file febio_spec.Output.logfile.ATTR.file=febioLogFileName; febio_spec.Output.logfile.node_data{1}.ATTR.file=febioLogFileName_disp; febio_spec.Output.logfile.node_data{1}.ATTR.data='ux;uy;uz'; febio_spec.Output.logfile.node_data{1}.ATTR.delim=','; febio_spec.Output.logfile.node_data{1}.VAL=1:size(V,1); % Plotfile section febio_spec.Output.plotfile.compression=0;
Quick viewing of the FEBio input file structure
The febView function can be used to view the xml structure in a MATLAB figure window.
febView(febio_spec); %Viewing the febio file
Exporting the FEBio input file
Exporting the febio_spec structure to an FEBio input file is done using the febioStruct2xml function.
febioStruct2xml(febio_spec,febioFebFileName); %Exporting to file and domNode
Running the FEBio analysis
To run the analysis defined by the created FEBio input file the runMonitorFEBio function is used. The input for this function is a structure defining job settings e.g. the FEBio input file name. The optional output runFlag informs the user if the analysis was run succesfully.
febioAnalysis.run_filename=febioFebFileName; %The input file name febioAnalysis.run_logname=febioLogFileName; %The name for the log file febioAnalysis.disp_on=1; %Display information on the command window febioAnalysis.runMode=runMode; [runFlag]=runMonitorFEBio(febioAnalysis);%START FEBio NOW!!!!!!!!
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
--------> RUNNING/MONITORING FEBIO JOB <-------- 20-Apr-2023 17:57:39
FEBio path: /home/kevin/FEBioStudio2/bin/febio4
# Attempt removal of existing log files 20-Apr-2023 17:57:39
* Removal succesful 20-Apr-2023 17:57:39
# Attempt removal of existing .xplt files 20-Apr-2023 17:57:39
* Removal succesful 20-Apr-2023 17:57:39
# Starting FEBio... 20-Apr-2023 17:57:39
Max. total analysis time is: Inf s
* Waiting for log file creation 20-Apr-2023 17:57:39
Max. wait time: 30 s
* Log file found. 20-Apr-2023 17:57:40
# Parsing log file... 20-Apr-2023 17:57:40
number of iterations : 6 20-Apr-2023 17:57:41
number of reformations : 6 20-Apr-2023 17:57:41
number of iterations : 5 20-Apr-2023 17:57:43
number of reformations : 5 20-Apr-2023 17:57:43
------- converged at time : 0.05 20-Apr-2023 17:57:43
number of iterations : 5 20-Apr-2023 17:57:44
------- converged at time : 0.075 20-Apr-2023 17:57:44
number of iterations : 5 20-Apr-2023 17:57:45
number of reformations : 5 20-Apr-2023 17:57:45
------- converged at time : 0.1 20-Apr-2023 17:57:45
number of iterations : 6 20-Apr-2023 17:57:46
number of reformations : 6 20-Apr-2023 17:57:46
------- converged at time : 0.125 20-Apr-2023 17:57:46
number of iterations : 5 20-Apr-2023 17:57:47
number of reformations : 5 20-Apr-2023 17:57:47
------- converged at time : 0.15 20-Apr-2023 17:57:47
number of iterations : 6 20-Apr-2023 17:57:49
number of reformations : 6 20-Apr-2023 17:57:49
------- converged at time : 0.175 20-Apr-2023 17:57:49
number of iterations : 6 20-Apr-2023 17:57:50
------- converged at time : 0.2 20-Apr-2023 17:57:50
number of iterations : 6 20-Apr-2023 17:57:51
number of reformations : 6 20-Apr-2023 17:57:51
------- converged at time : 0.225 20-Apr-2023 17:57:51
number of iterations : 7 20-Apr-2023 17:57:52
number of reformations : 7 20-Apr-2023 17:57:52
------- converged at time : 0.25 20-Apr-2023 17:57:52
number of iterations : 7 20-Apr-2023 17:57:54
number of reformations : 7 20-Apr-2023 17:57:54
------- converged at time : 0.273164 20-Apr-2023 17:57:54
number of iterations : 8 20-Apr-2023 17:57:55
number of reformations : 8 20-Apr-2023 17:57:55
------- converged at time : 0.294628 20-Apr-2023 17:57:55
number of iterations : 7 20-Apr-2023 17:57:57
number of reformations : 7 20-Apr-2023 17:57:57
------- converged at time : 0.31325 20-Apr-2023 17:57:57
number of iterations : 8 20-Apr-2023 17:57:59
number of reformations : 8 20-Apr-2023 17:57:59
------- converged at time : 0.33051 20-Apr-2023 17:57:59
number of iterations : 8 20-Apr-2023 17:58:01
number of reformations : 8 20-Apr-2023 17:58:01
------- converged at time : 0.34549 20-Apr-2023 17:58:01
number of iterations : 7 20-Apr-2023 17:58:02
number of reformations : 7 20-Apr-2023 17:58:02
------- converged at time : 0.358497 20-Apr-2023 17:58:02
number of iterations : 9 20-Apr-2023 17:58:05
number of reformations : 9 20-Apr-2023 17:58:05
------- converged at time : 0.370558 20-Apr-2023 17:58:05
number of iterations : 6 20-Apr-2023 17:58:06
number of reformations : 6 20-Apr-2023 17:58:06
------- converged at time : 0.380451 20-Apr-2023 17:58:06
number of iterations : 8 20-Apr-2023 17:58:08
number of reformations : 8 20-Apr-2023 17:58:08
------- converged at time : 0.390344 20-Apr-2023 17:58:08
number of iterations : 6 20-Apr-2023 17:58:09
number of reformations : 6 20-Apr-2023 17:58:09
------- converged at time : 0.398946 20-Apr-2023 17:58:09
number of iterations : 7 20-Apr-2023 17:58:10
number of reformations : 7 20-Apr-2023 17:58:10
------- converged at time : 0.407547 20-Apr-2023 17:58:10
number of iterations : 6 20-Apr-2023 17:58:12
number of reformations : 6 20-Apr-2023 17:58:12
------- converged at time : 0.415529 20-Apr-2023 17:58:12
number of iterations : 5 20-Apr-2023 17:58:13
number of reformations : 5 20-Apr-2023 17:58:13
------- converged at time : 0.423511 20-Apr-2023 17:58:13
number of reformations : 6 20-Apr-2023 17:58:15
------- converged at time : 0.433117 20-Apr-2023 17:58:15
number of iterations : 6 20-Apr-2023 17:58:17
number of reformations : 6 20-Apr-2023 17:58:17
------- converged at time : 0.442723 20-Apr-2023 17:58:17
number of iterations : 6 20-Apr-2023 17:58:18
number of reformations : 6 20-Apr-2023 17:58:18
------- converged at time : 0.45233 20-Apr-2023 17:58:18
number of iterations : 5 20-Apr-2023 17:58:19
number of reformations : 5 20-Apr-2023 17:58:19
number of iterations : 6 20-Apr-2023 17:58:20
number of reformations : 6 20-Apr-2023 17:58:20
------- converged at time : 0.473011 20-Apr-2023 17:58:20
number of iterations : 5 20-Apr-2023 17:58:21
number of reformations : 5 20-Apr-2023 17:58:21
------- converged at time : 0.484087 20-Apr-2023 17:58:21
number of iterations : 5 20-Apr-2023 17:58:22
number of reformations : 5 20-Apr-2023 17:58:22
------- converged at time : 0.496491 20-Apr-2023 17:58:22
number of iterations : 5 20-Apr-2023 17:58:23
number of reformations : 5 20-Apr-2023 17:58:23
number of iterations : 5 20-Apr-2023 17:58:25
number of reformations : 5 20-Apr-2023 17:58:25
------- converged at time : 0.524792 20-Apr-2023 17:58:25
number of iterations : 5 20-Apr-2023 17:58:26
number of reformations : 5 20-Apr-2023 17:58:26
------- converged at time : 0.54047 20-Apr-2023 17:58:26
number of iterations : 6 20-Apr-2023 17:58:27
number of reformations : 6 20-Apr-2023 17:58:27
------- converged at time : 0.557037 20-Apr-2023 17:58:27
number of iterations : 5 20-Apr-2023 17:58:28
number of reformations : 5 20-Apr-2023 17:58:28
------- converged at time : 0.573605 20-Apr-2023 17:58:28
number of iterations : 5 20-Apr-2023 17:58:29
number of reformations : 5 20-Apr-2023 17:58:29
------- converged at time : 0.590977 20-Apr-2023 17:58:29
number of iterations : 5 20-Apr-2023 17:58:31
number of reformations : 5 20-Apr-2023 17:58:31
------- converged at time : 0.609077 20-Apr-2023 17:58:31
number of iterations : 5 20-Apr-2023 17:58:32
number of reformations : 5 20-Apr-2023 17:58:32
------- converged at time : 0.627836 20-Apr-2023 17:58:32
number of iterations : 5 20-Apr-2023 17:58:33
number of reformations : 5 20-Apr-2023 17:58:33
------- converged at time : 0.647191 20-Apr-2023 17:58:33
number of iterations : 5 20-Apr-2023 17:58:34
number of reformations : 5 20-Apr-2023 17:58:34
number of iterations : 5 20-Apr-2023 17:58:35
number of reformations : 5 20-Apr-2023 17:58:35
------- converged at time : 0.687465 20-Apr-2023 17:58:35
number of iterations : 5 20-Apr-2023 17:58:36
number of reformations : 5 20-Apr-2023 17:58:36
------- converged at time : 0.708287 20-Apr-2023 17:58:36
number of iterations : 6 20-Apr-2023 17:58:37
number of reformations : 6 20-Apr-2023 17:58:37
------- converged at time : 0.729507 20-Apr-2023 17:58:37
number of iterations : 6 20-Apr-2023 17:58:39
number of reformations : 6 20-Apr-2023 17:58:39
------- converged at time : 0.750728 20-Apr-2023 17:58:39
number of iterations : 6 20-Apr-2023 17:58:41
number of reformations : 6 20-Apr-2023 17:58:41
------- converged at time : 0.771948 20-Apr-2023 17:58:41
number of iterations : 6 20-Apr-2023 17:58:42
------- converged at time : 0.793169 20-Apr-2023 17:58:42
number of iterations : 5 20-Apr-2023 17:58:43
number of reformations : 5 20-Apr-2023 17:58:43
------- converged at time : 0.814389 20-Apr-2023 17:58:43
number of iterations : 12 20-Apr-2023 17:58:46
number of reformations : 12 20-Apr-2023 17:58:46
------- converged at time : 0.83597 20-Apr-2023 17:58:46
number of iterations : 8 20-Apr-2023 17:58:55
number of reformations : 8 20-Apr-2023 17:58:55
------- converged at time : 0.843637 20-Apr-2023 17:58:55
number of iterations : 7 20-Apr-2023 17:58:56
number of reformations : 7 20-Apr-2023 17:58:56
------- converged at time : 0.85031 20-Apr-2023 17:58:56
number of iterations : 8 20-Apr-2023 17:58:58
number of reformations : 8 20-Apr-2023 17:58:58
------- converged at time : 0.856507 20-Apr-2023 17:58:58
number of iterations : 7 20-Apr-2023 17:58:59
number of reformations : 7 20-Apr-2023 17:58:59
------- converged at time : 0.861907 20-Apr-2023 17:58:59
number of iterations : 7 20-Apr-2023 17:59:01
number of reformations : 7 20-Apr-2023 17:59:01
------- converged at time : 0.866925 20-Apr-2023 17:59:01
number of iterations : 14 20-Apr-2023 17:59:05
number of reformations : 14 20-Apr-2023 17:59:05
------- converged at time : 0.871589 20-Apr-2023 17:59:05
number of iterations : 8 20-Apr-2023 17:59:07
number of reformations : 8 20-Apr-2023 17:59:07
------- converged at time : 0.874729 20-Apr-2023 17:59:07
number of iterations : 7 20-Apr-2023 17:59:08
number of reformations : 7 20-Apr-2023 17:59:08
------- converged at time : 0.877481 20-Apr-2023 17:59:08
number of iterations : 6 20-Apr-2023 17:59:09
number of reformations : 6 20-Apr-2023 17:59:09
------- converged at time : 0.880048 20-Apr-2023 17:59:09
number of iterations : 7 20-Apr-2023 17:59:11
number of reformations : 7 20-Apr-2023 17:59:11
------- converged at time : 0.882615 20-Apr-2023 17:59:11
number of iterations : 7 20-Apr-2023 17:59:13
number of reformations : 7 20-Apr-2023 17:59:13
------- converged at time : 0.88501 20-Apr-2023 17:59:13
number of iterations : 7 20-Apr-2023 17:59:14
number of reformations : 7 20-Apr-2023 17:59:14
------- converged at time : 0.887246 20-Apr-2023 17:59:14
number of iterations : 5 20-Apr-2023 17:59:16
number of reformations : 5 20-Apr-2023 17:59:16
------- converged at time : 0.889335 20-Apr-2023 17:59:16
number of iterations : 7 20-Apr-2023 17:59:17
number of reformations : 7 20-Apr-2023 17:59:17
------- converged at time : 0.89361 20-Apr-2023 17:59:17
number of iterations : 7 20-Apr-2023 17:59:18
number of reformations : 7 20-Apr-2023 17:59:18
------- converged at time : 0.897587 20-Apr-2023 17:59:18
number of iterations : 7 20-Apr-2023 17:59:20
number of reformations : 7 20-Apr-2023 17:59:20
------- converged at time : 0.901288 20-Apr-2023 17:59:20
number of iterations : 7 20-Apr-2023 17:59:21
number of reformations : 7 20-Apr-2023 17:59:21
------- converged at time : 0.904732 20-Apr-2023 17:59:21
number of iterations : 6 20-Apr-2023 17:59:23
number of reformations : 6 20-Apr-2023 17:59:23
------- converged at time : 0.907939 20-Apr-2023 17:59:23
number of iterations : 6 20-Apr-2023 17:59:24
------- converged at time : 0.911147 20-Apr-2023 17:59:24
number of iterations : 7 20-Apr-2023 17:59:25
number of reformations : 7 20-Apr-2023 17:59:25
------- converged at time : 0.914354 20-Apr-2023 17:59:25
number of iterations : 6 20-Apr-2023 17:59:27
number of reformations : 6 20-Apr-2023 17:59:27
------- converged at time : 0.917342 20-Apr-2023 17:59:27
number of iterations : 6 20-Apr-2023 17:59:28
number of reformations : 6 20-Apr-2023 17:59:28
------- converged at time : 0.920331 20-Apr-2023 17:59:28
number of iterations : 7 20-Apr-2023 17:59:30
number of reformations : 7 20-Apr-2023 17:59:30
------- converged at time : 0.923319 20-Apr-2023 17:59:30
number of iterations : 7 20-Apr-2023 17:59:31
number of reformations : 7 20-Apr-2023 17:59:31
number of iterations : 7 20-Apr-2023 17:59:33
number of reformations : 7 20-Apr-2023 17:59:33
------- converged at time : 0.928701 20-Apr-2023 17:59:33
number of iterations : 7 20-Apr-2023 17:59:35
number of reformations : 7 20-Apr-2023 17:59:35
------- converged at time : 0.931123 20-Apr-2023 17:59:35
number of iterations : 7 20-Apr-2023 17:59:36
number of reformations : 7 20-Apr-2023 17:59:36
------- converged at time : 0.933385 20-Apr-2023 17:59:36
number of iterations : 7 20-Apr-2023 17:59:38
number of reformations : 7 20-Apr-2023 17:59:38
------- converged at time : 0.935497 20-Apr-2023 17:59:38
number of iterations : 7 20-Apr-2023 17:59:40
number of reformations : 7 20-Apr-2023 17:59:40
------- converged at time : 0.937472 20-Apr-2023 17:59:40
number of iterations : 7 20-Apr-2023 17:59:41
number of reformations : 7 20-Apr-2023 17:59:41
------- converged at time : 0.939318 20-Apr-2023 17:59:41
number of iterations : 6 20-Apr-2023 17:59:43
number of reformations : 6 20-Apr-2023 17:59:43
------- converged at time : 0.941046 20-Apr-2023 17:59:43
number of iterations : 6 20-Apr-2023 17:59:44
number of reformations : 6 20-Apr-2023 17:59:44
------- converged at time : 0.942774 20-Apr-2023 17:59:44
number of iterations : 7 20-Apr-2023 17:59:46
number of reformations : 7 20-Apr-2023 17:59:46
------- converged at time : 0.944502 20-Apr-2023 17:59:46
number of iterations : 7 20-Apr-2023 17:59:47
number of reformations : 7 20-Apr-2023 17:59:47
------- converged at time : 0.94612 20-Apr-2023 17:59:47
number of iterations : 7 20-Apr-2023 17:59:48
number of reformations : 7 20-Apr-2023 17:59:48
------- converged at time : 0.947637 20-Apr-2023 17:59:48
number of iterations : 6 20-Apr-2023 17:59:50
number of reformations : 6 20-Apr-2023 17:59:50
------- converged at time : 0.94906 20-Apr-2023 17:59:50
number of iterations : 6 20-Apr-2023 17:59:51
number of reformations : 6 20-Apr-2023 17:59:51
------- converged at time : 0.950483 20-Apr-2023 17:59:51
number of iterations : 7 20-Apr-2023 17:59:53
number of reformations : 7 20-Apr-2023 17:59:53
------- converged at time : 0.951906 20-Apr-2023 17:59:53
number of iterations : 6 20-Apr-2023 17:59:55
number of reformations : 6 20-Apr-2023 17:59:55
------- converged at time : 0.953241 20-Apr-2023 17:59:55
number of iterations : 6 20-Apr-2023 17:59:56
number of reformations : 6 20-Apr-2023 17:59:56
------- converged at time : 0.954577 20-Apr-2023 17:59:56
number of iterations : 10 20-Apr-2023 17:59:58
number of reformations : 10 20-Apr-2023 17:59:58
------- converged at time : 0.955913 20-Apr-2023 17:59:58
number of iterations : 13 20-Apr-2023 18:00:01
number of reformations : 13 20-Apr-2023 18:00:01
------- converged at time : 0.957004 20-Apr-2023 18:00:01
number of iterations : 6 20-Apr-2023 18:00:02
number of reformations : 6 20-Apr-2023 18:00:02
------- converged at time : 0.957826 20-Apr-2023 18:00:02
number of iterations : 6 20-Apr-2023 18:00:04
number of reformations : 6 20-Apr-2023 18:00:04
------- converged at time : 0.958647 20-Apr-2023 18:00:04
number of iterations : 5 20-Apr-2023 18:00:05
number of reformations : 5 20-Apr-2023 18:00:05
------- converged at time : 0.959468 20-Apr-2023 18:00:05
number of iterations : 7 20-Apr-2023 18:00:07
number of reformations : 7 20-Apr-2023 18:00:07
------- converged at time : 0.962598 20-Apr-2023 18:00:07
number of iterations : 6 20-Apr-2023 18:00:08
------- converged at time : 0.965513 20-Apr-2023 18:00:08
number of iterations : 6 20-Apr-2023 18:00:09
number of reformations : 6 20-Apr-2023 18:00:09
------- converged at time : 0.968429 20-Apr-2023 18:00:09
number of iterations : 7 20-Apr-2023 18:00:10
number of reformations : 7 20-Apr-2023 18:00:10
------- converged at time : 0.971344 20-Apr-2023 18:00:10
number of iterations : 5 20-Apr-2023 18:00:11
number of reformations : 5 20-Apr-2023 18:00:11
------- converged at time : 0.974062 20-Apr-2023 18:00:11
number of iterations : 7 20-Apr-2023 18:00:13
number of reformations : 7 20-Apr-2023 18:00:13
------- converged at time : 0.978907 20-Apr-2023 18:00:13
number of iterations : 6 20-Apr-2023 18:00:14
number of reformations : 6 20-Apr-2023 18:00:14
------- converged at time : 0.98341 20-Apr-2023 18:00:14
number of iterations : 6 20-Apr-2023 18:00:16
number of reformations : 6 20-Apr-2023 18:00:16
------- converged at time : 0.987914 20-Apr-2023 18:00:16
number of iterations : 6 20-Apr-2023 18:00:17
number of reformations : 6 20-Apr-2023 18:00:17
------- converged at time : 0.992418 20-Apr-2023 18:00:17
number of iterations : 5 20-Apr-2023 18:00:18
number of reformations : 5 20-Apr-2023 18:00:18
------- converged at time : 0.996922 20-Apr-2023 18:00:18
number of iterations : 5 20-Apr-2023 18:00:19
number of reformations : 5 20-Apr-2023 18:00:19
------- converged at time : 1 20-Apr-2023 18:00:19
Elapsed time : 0:02:39 20-Apr-2023 18:00:19
N O R M A L T E R M I N A T I O N
# Done 20-Apr-2023 18:00:19
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Import FEBio results
if runFlag==1 %i.e. a succesful run
Importing nodal displacements from a log file
dataStruct=importFEBio_logfile(fullfile(savePath,febioLogFileName_disp),0,1);
%Access data
N_disp_mat=dataStruct.data; %Displacement
timeVec=dataStruct.time; %Time
%Create deformed coordinate set
V_DEF=N_disp_mat+repmat(V,[1 1 size(N_disp_mat,3)]);
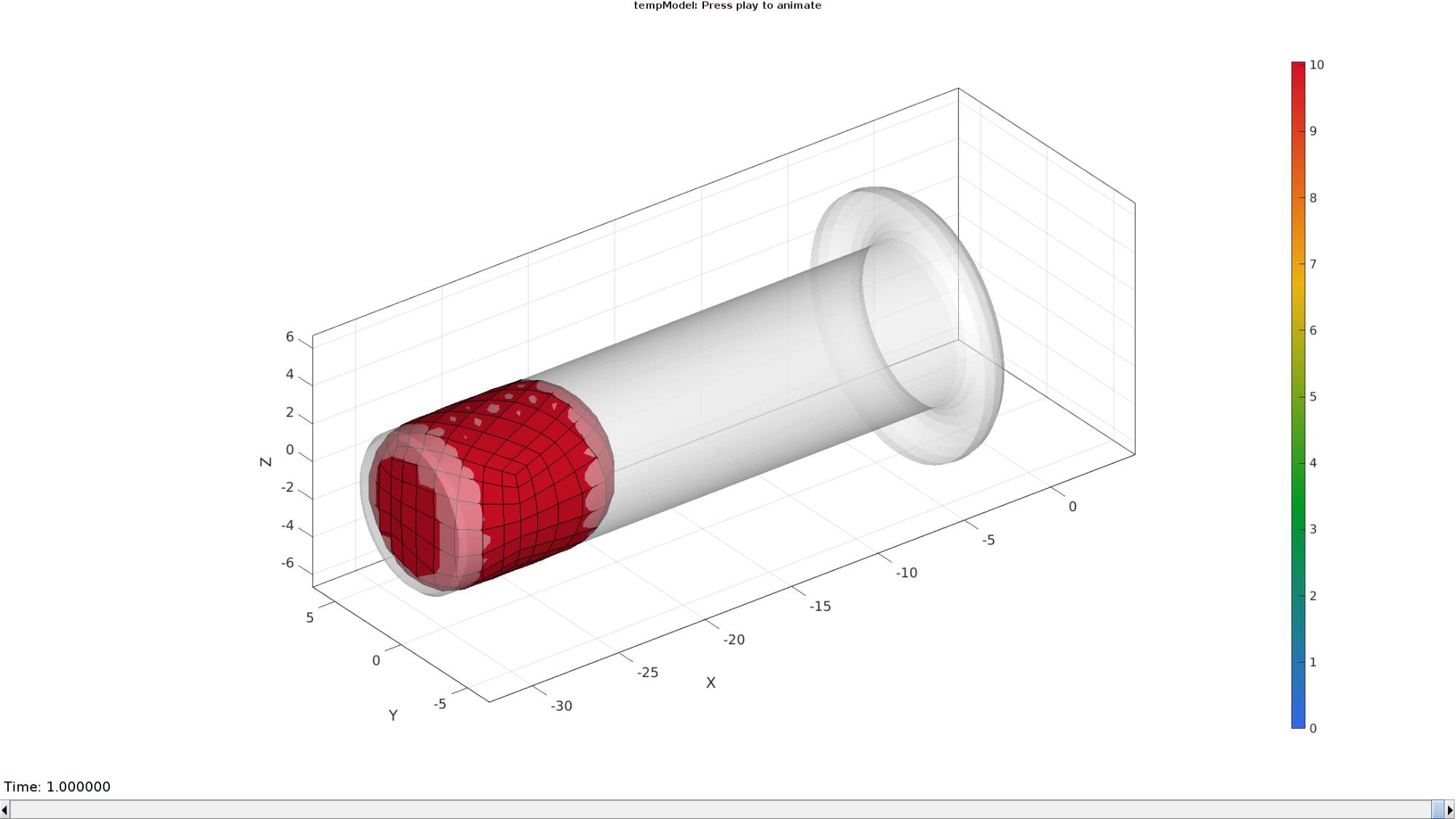
Plotting the simulated results using anim8 to visualize and animate deformations
DN_magnitude=sqrt(sum(N_disp_mat(:,:,end).^2,2)); %Current displacement magnitude % Create basic view and store graphics handle to initiate animation hf=cFigure; hold on; gtitle([febioFebFileNamePart,': Press play to animate']); hp=gpatch(Fb_blob,V_DEF(:,:,end),DN_magnitude,'k',1); %Add graphics object to animate hp.FaceColor='interp'; gpatch(F_tube,V,'w','none',0.5); %Add graphics object to animate axisGeom(gca,fontSize); colormap(gjet(250)); colorbar; caxis([0 max(DN_magnitude)]/3); axis(axisLim(V_DEF)); %Set axis limits statically camlight headlight; drawnow; % Set up animation features animStruct.Time=timeVec; %The time vector for qt=1:1:size(N_disp_mat,3) %Loop over time increments DN_magnitude=sqrt(sum(N_disp_mat(:,:,qt).^2,2)); %Current displacement magnitue %Set entries in animation structure animStruct.Handles{qt}=[hp hp]; %Handles of objects to animate animStruct.Props{qt}={'Vertices','CData'}; %Properties of objects to animate animStruct.Set{qt}={V_DEF(:,:,qt),DN_magnitude}; %Property values for to set in order to animate end anim8(hf,animStruct); %Initiate animation feature drawnow;
end

GIBBON www.gibboncode.org
Kevin Mattheus Moerman, [email protected]
GIBBON footer text
License: https://github.com/gibbonCode/GIBBON/blob/master/LICENSE
GIBBON: The Geometry and Image-based Bioengineering add-On. A toolbox for image segmentation, image-based modeling, meshing, and finite element analysis.
Copyright (C) 2006-2022 Kevin Mattheus Moerman and the GIBBON contributors
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.