ellipseCoord3
Below is a demonstration of the features of the ellipseCoord3 function
Contents
clear; close all; clc;
Syntax
[V]=ellipseCoord3(e,t);
Description
Calculates ellipse coordinates for the angles in t based on the input structure e which contains the following fields: radii, a 2x1 array axes, a 3x3 rotation matrix centre the ellipse centre coordinates
Examples
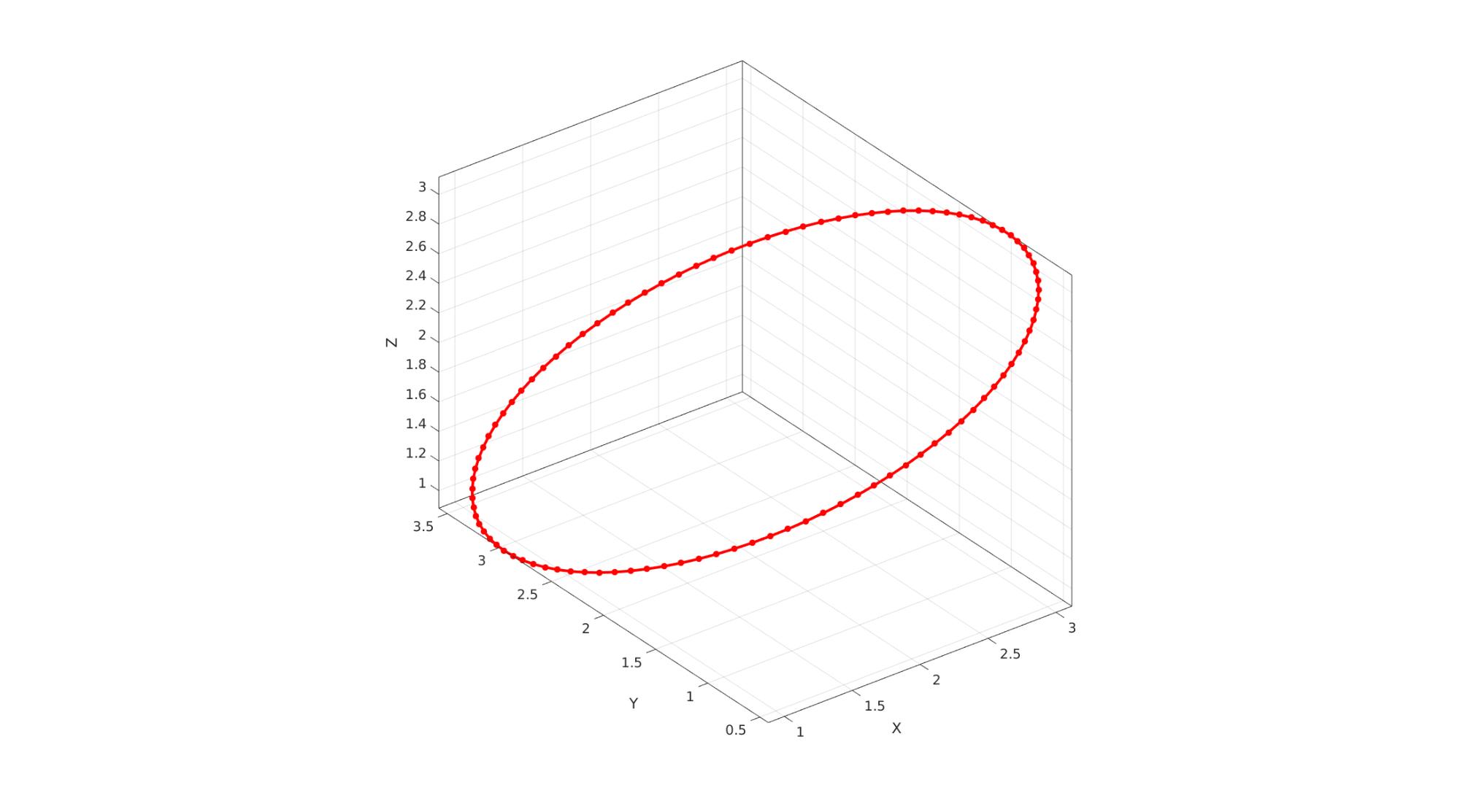
%Define example input data %Angles t=linspace(0,2*pi); %Centre coordinates Vc=[2 2 2]; %Radii r=[1 2]; %Rotation matrix Q=euler2DCM([0 -0.25*pi 0.25*pi]); %Compose input structure e.centre=Vc; e.radii=r; e.axes=Q; %Compute ellipse coordinates V=ellipseCoord3(e,t);
Visualize ellipse
cFigure; plotV(V,'r.-','MarkerSize',25,'LineWidth',3); axisGeom; drawnow;

GIBBON www.gibboncode.org
Kevin Mattheus Moerman, [email protected]
GIBBON footer text
License: https://github.com/gibbonCode/GIBBON/blob/master/LICENSE
GIBBON: The Geometry and Image-based Bioengineering add-On. A toolbox for image segmentation, image-based modeling, meshing, and finite element analysis.
Copyright (C) 2006-2023 Kevin Mattheus Moerman and the GIBBON contributors
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.